Building a Pathfinding Visualizer in Rust
An interactive playground for exploring how different pathfinding algorithms navigate through procedurally generated caves.
╌╌╌╌
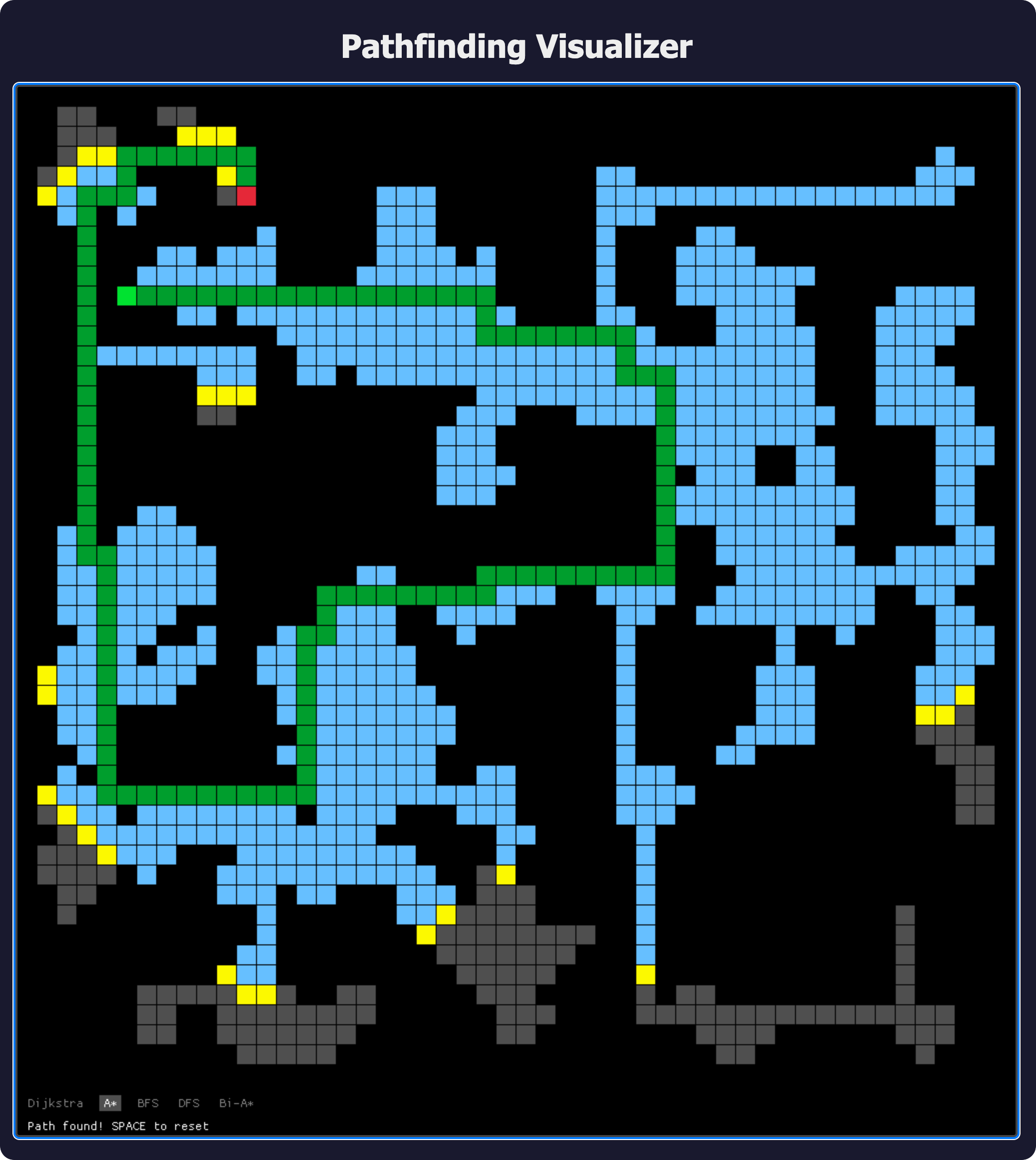
I recently built a pathfinding visualizer in Rust as a way to better understand how different graph traversal algorithms work. There’s something satisfying about watching an algorithm explore a maze in real-time, seeing the frontier expand as it searches for the optimal path.
You can try it yourself at joonaspessi.github.io/path_finding.
The Algorithms
The visualizer implements five different pathfinding algorithms, each with its own exploration strategy:
- Dijkstra’s Algorithm explores outward uniformly, guaranteeing the shortest path but visiting many unnecessary nodes
- A* adds a heuristic to guide the search toward the goal, making it much more efficient
- Bidirectional A* runs two searches simultaneously from both ends, meeting in the middle
- Breadth-First Search explores level by level, simple but effective for unweighted grids
- Depth-First Search dives deep before backtracking, often finding suboptimal paths
Implementation
Source code for the implementation can be found from github joonaspessi/path_finding
All algorithms implement a common trait that standardizes how they execute:
pub trait PathfindingAlgorithm {
fn step(&mut self, grid: &Grid) -> bool;
fn is_finished(&self) -> bool;
fn get_path(&self) -> Option<Vec<(usize, usize)>>;
fn get_visited(&self) -> &HashSet<(usize, usize)>;
fn get_queue(&self) -> Vec<(usize, usize)>;
}
This design makes it trivial to swap between algorithms at runtime. Each algorithm maintains its own state and advances one step at a time, allowing the visualizer to render the exploration process.
Procedural Cave Generation
To make the visualizer more interesting, I added a cellular automata-based cave generator. The process works in four phases:
- Randomly fill the grid with walls at 45% probability
- Apply smoothing passes to create natural-looking cave structures
- Connect isolated regions with corridors using flood-fill detection
- Place start and end points at the furthest reachable positions
The smoothing step uses a simple rule: if a cell has more than 4 wall neighbors, it becomes a wall; otherwise it becomes empty. After a few iterations, this produces organic-looking cave systems.
Technical Stack
The project is built with macroquad, a simple Rust game library that compiles to both native and WebAssembly. This made it easy to deploy to GitHub Pages while keeping the development experience straightforward.
The controls are simple: left-click to toggle walls, right-click to place start and end points, Tab to switch algorithms, and Space to run the pathfinding. Press G to generate a new random cave.
Building this visualizer was a great way to internalize how these algorithms actually behave, beyond just reading about their time complexity. Seeing A* laser-focus toward the goal while Dijkstra methodically explores everything makes the theoretical advantages tangible.